On the differences between universal emergent time (UEC) and universal coordinated time (UTC)
This is to become a collection of thoughts on the future of self-organized synchronization in coordination and timing applications. On the one hand it will be a collection of the current applications that I see as a potential use cases and markets, on the other hand I will continue the process of boiling down the differences of this approach to state-of-the-art hierarchical solutions. The concept of a spatially distributed emergent clock vs the concept of many individual clocks that are spatially distributed and corrected in a hierarchical manner will be discussed. Also, I am happy for any criticism, feedback and thoughts.
WORK IN PROGRESS
This is supposed to be more a basis for discussion and thought than a source of factual information.
State-of-the-art time-standards based on reference periodic processes
A time standard is a specification on how to measure time which historically were often bound to Earth’s rotational period. Time standards provide either a way to specify how fast time passes, and/or provides fixed points in time.
The current time-standards important for most of our everyday life are the coordinated universal time (UTC) and the international atomic time (TAI). For those who wonder about the order of letters in the abbreviations have their origin in french, i.e., temps atomique international and temps universel coordonné. While UTC is organized to stay close to mean solar time, it is related to the TAI time standard which is tied to the definition of the SI second.
So far most of the existing time-standards are related to a reference, such as the periodicity of the Earths rotation or frequencies related to physical processes. Subsequently other clocks can be synchronized to the time defined by these standards in a hierarchical way. This of course relies on the transmission of signals for the correction of time within the network of spatially distributed clocks. At large distances and/or high frequencies this become a challenging part, even if the signal transmission times can in general be measured and compensated for. The quality of synchronization then depends on the accuracy with which the signalling times can be measured.
In summary that means, that synchronization via hierarchical solutions relies on very frequency stable reference clocks that feed-forward their signal to individual distributed clocks in order to correct the time-deviations arising due to the inevitable (there are no identical clocks) drift.
I would like to note there, that the TAI is not a hierarchically synchronized systems but instead a plesiosynchronous system. There is no coupling between these clocks. However, their difference towards their weighted average is used to correct the time-stamps that they provide to third parties. The plesiosynchronous approach is usually chosen for networks that consist of very frequency stable clocks/oscillators.
A time-standard based on a spatially distributed clock arising over a network of mutually delay-coupled clocks
Spice simulations of digital phase-locked loop systems
LTSpice based simulations of two mutually delay-coupled digital phase-locked loops (DPLLs). These simulations take into account the dynamics of the voltages and currents, as well as the processing time of different electronic circuitry used in PLL components. We compare the results to our theoretical predictions from the phase-model.
We use LTSpice, an open source analog circuit simulator to simulate systems of coupled DPLL on the level of the voltage and current time-series.
Using this industry-standard approach to test the circuit architectures down to the transistor level before setting up the prototype systems for experimentation allows to identify potential problems such as parasitic resistances and capacitances. We also use it to gain a better intuition on the dynamics within the circuitry as components become heterogeneous and are subject to noise.
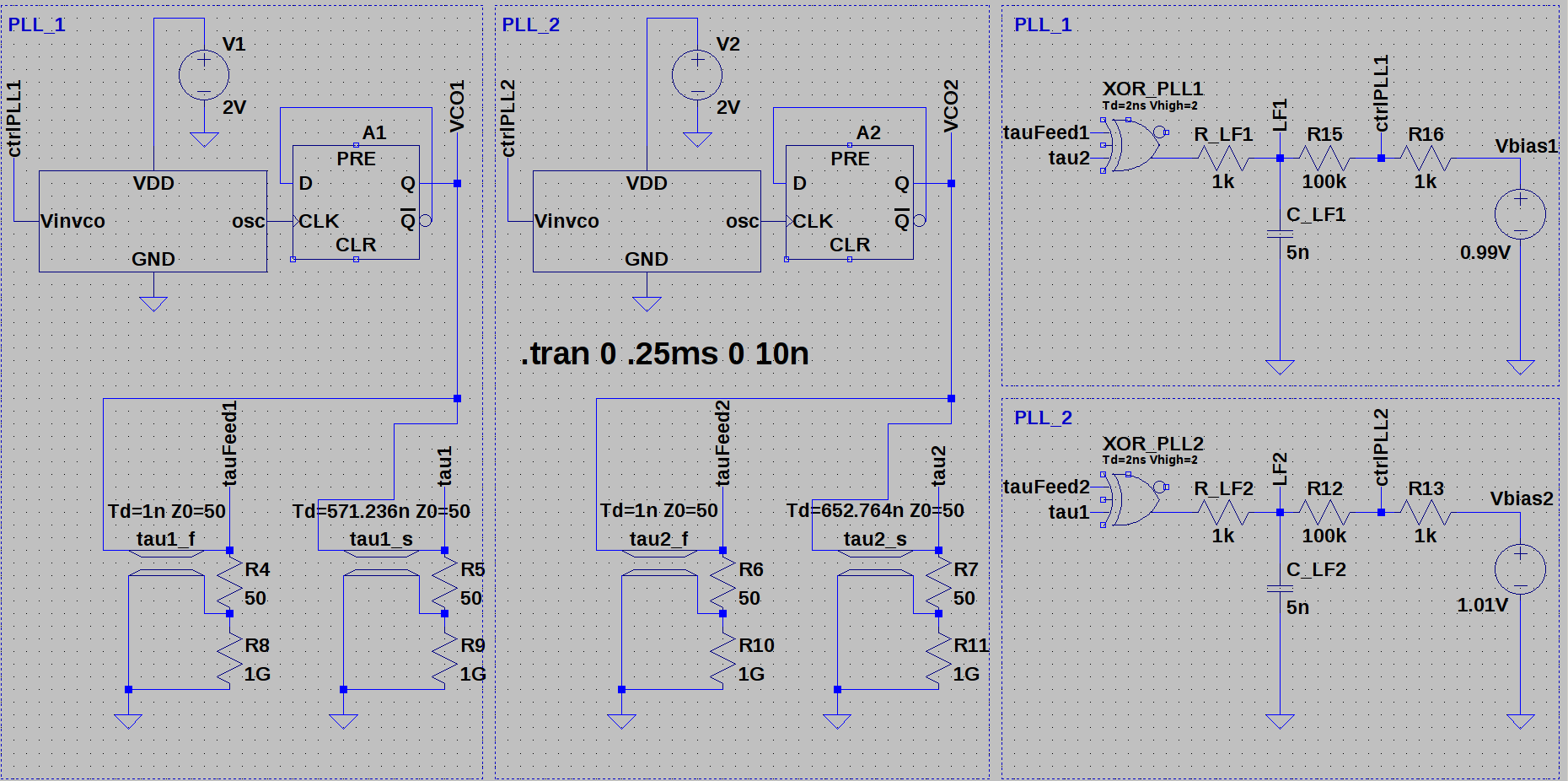
Here we present our current ongoing work on a system of two mutually delay-coupled digital phase-locked loops (DPLLs), each consisting of a phase detector (XOR or flip-flop), a loop filter (first order low pass filter) and an voltage-controlled oscillator (VCO). The VCO is a ring oscillator which is set up from a closed chain of inverter elements, designed by Jacob Baker and available from YOUSPICE.
Fig.1: Two digital phase-locked loops with first order loop filter, delayed feedback and transmission lines for mutual coupling. The DPLLs are separated into two part, the VCO and delay-lines (left), and the phase-detector and loop filter components (right). No reference clock involved.
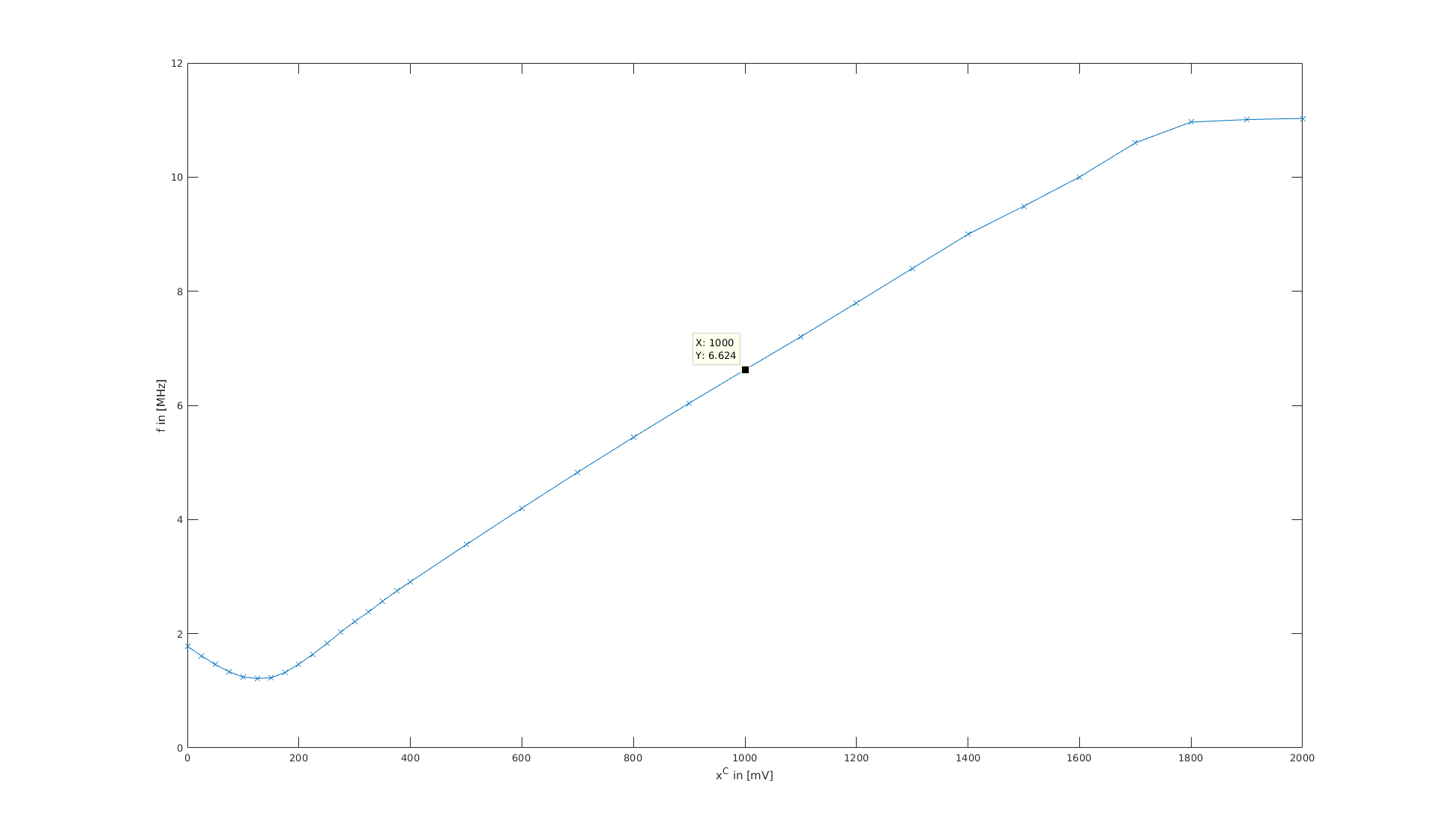
Before going into the details of this circuit, we show the response curve of the VCO plotted against the input voltage at Vinvco.The VCO is supplied by a 2V power source and we changed the parasitic capacitor in the inverter subcircuits of the VCO to fF.
Fig. 2: VCO with rectangular output signals designed by R. Jacob Baker. The measurements are included as a table.Fig. 3: Response curve of VCO (ring oscillator) for supply voltage 2V and parasitic capacitance .
Science Slam @Elbhangfest in Dresden, 2018/06/23
This is the guiding draft for a Science Slam that I contributed at the Elbhangfest 2018 in Dresden.
In the beautiful scenery of Pillnitz Palace at the riverside of the Elbe, the stage hosted great contributions from the Arts, Music and Science in a thoughtful mix.
(deutsche Fassung weiter unten)
Simultaneity. On synchronization in modern electronic clocks.
I would like to start with an experiment. Please applaud now, as if you all wanted an encore from your favorite band.
[wait until the audience has found a common rhythm of clapping their hands]
As you probably heard, it took a while until you had found a common rhythm. This rhythm was self-organized, as each of you adjusted the repetition speed of clapping according to that of your neighbors. In other situation, e.g., in large soccer arenas synchronizing is much harder. This is because of the relatively large distances and the delay with with each person perceives the clapping of distant fans.
[short pause]
Now imagine, hundreds or thousands of elements, e.g., electronic clocks need to be coordinated in time. And those do not “clap” just once, but tick many billions of times in a second. Currently, this coordination is achieved by a precise reference clock that dictates its time to all other clocks. That means: a conductor, placed well visible in the middle of the arena, provides the rhythm for a billion claps per second to the audience. That of course impossible thing for the conductor, also reaches its limits in electronic systems.
[short pause]
Looking for alternatives, we were inspired by work from colleagues at the Max Planck Institute for Molecular Cell Biology and Genetics. They study the astonishing periodicity of the formation of the vertebrae during embryonic development. The rhythm necessary for that pattern formation results tissue-wide by the interactions of hundreds of cellular clocks. That also works in the presence of large time-delays in the intercellular communication. That means, similarly to how you as a group found a common rhythm, the cells self-organize their mutual states to be the same.
[short pause]
We formalized this approach to coordination without a dictating conductor in an abstract mathematical model. That helped us to understand how to transfer the concept of self-organized synchronization in the presence of time-delayed communication to electronic systems. Experiments in prototype systems show promising results and great agreement with the model. Our goal is to apply this approach in modern technologies, such as e.g. indoor navigation and robotics. Moreover, we aim to enable new technologies that could not be realized with the hierarchal approach.
Thank you for your attention.
Was bedeutet gleichzeitig? Über die Synchronisation moderner Uhren.
Ich möchte mit einem Experiment beginnen. Bitte applaudieren Sie jetzt alle so, wie sie es tun um eine Zugabe bei einem Konzert Ihrer Lieblingsband zu bekommen.
[warten bis das Publikum einen gemeinsamen Rhythmus gefunden hat]
Wie Sie hörten dauerte es eine Weile bis Sie einen gemeinsamen Rhythmus gefunden hatten. Diesen haben Sie als Gruppe selbst organisiert indem Sie ihr Klatschen an das Ihrer Nachbarn angepasst haben. In anderen Situationen, z.B. im (Fussball-)Stadion wäre das schwieriger. Grund dafür sind die relativ großen Entfernungen und die Verzögerung mit der Sie das Klatschen von weit entfernten Besuchern wahrnehmen.
[kurze Pause]
Nun stellen Sie sich vor, es müssen hunderte oder tausende von Einheiten, z.B. elektronischen Uhren zeitlich aufeinander abgestimmt werden. Und diese “klatschen” nicht wie wir nur einmal, sondern ticken 1 Millarde mal pro Sekunde. Bisher wird diese Koordination durch einen präzisen Taktgeber der allen anderen Uhren die Zeit vorgibt realisiert.
Heißt: in der Stadionmitte steht ein Dirigent und gibt den Milliarden-takt für alle gut sichtbar an. Was für unseren Dirigenten unmöglich ist führt auch die elektronischen Systeme an die Grenzen des Machbaren.
[kurze Pause]
Auf der Suche nach Lösungen, die diese Hürden überwinden können, haben wir uns von unseren Kollegen am Max Planck Institut für molekulare Zell- biologie und Genetik inspirieren lassen. Sie beschäftigen sich mit der zeitlich streng koordinierten Formation der Wirbelkörper während der embryonalen Entwicklung. Der dafür notwendige Rhythmus ergibt sich gewebeübergreifend aus dem Zusammenspiel hunderter von individuellen zellulären Uhren. Das funktioniert auch dann, wenn die Kommunikation einer großen Zeitverzögerung unterliegt.
Das bedeutet also, in ähnlicher Weise wie Sie zu Beginn einen gemein-samen Rhythmus gefunden haben, selbst organisieren die beteiligten Zellen ihre Zustände.
[kurze Pause]
Diesen Ansatz der Koordination ohne taktvorgebenden Dirigenten haben wir in einem abstrakten mathematischen Modell formuliert. Damit haben wir verstanden wie wir das Konzept der selbstorganisierten Synchronisation auf verteilte elektronische Systeme übertragen können. Experimente an Prototypen zeigen dabei vielversprechende Resultate. Unser Ziel ist es, diese Idee in modernen technologischen Anwendungen, wie z.B. der Robotik und der Innenraum-Navigation, zu etablieren und neue Anwendungen zu ermöglichen, die mit dem aktuellen Stand der Technik nicht umzusetzen sind.
Self-organized synchronization in electronic systems
[collaborators: Nirmal Punetha, Niko Joram, Suropriya Saha, Shamik Gupta, Sara Ameli Kalkouran, Josefine Asmus, Daniel Platz, Benjamin Friedrich, David J. Jörg, Alexandros Pollakis, Wolfgang Rave, Gerhard Fettweis, Frank Ellinger, Frank Jülicher]
This project started as a collaboration between the Max-Planck Institute for the Physics of Complex Systems and the Vodafone Chair Mobile Communications Systems at the TU-Dresden within the Center for Advancing Electronic Dresden. In this project we explore self-organized synchronization of mutually delay-coupled electronic clocks. This concept with a flat hierarchy is different from the State-of-the-Art hierarchical approach to synchronization, where a reference clock dictates the time to all other clocks.
In electronic systems, information processing shared between large numbers of units and in parallel has become more and more important. Prominent examples are antenna arrays in radar and mobile communications, servers and databases, networks-on-chip, indoor and global navigation solutions, swarms of drones and robots, and sensor arrays. In such systems, robust operation and processing requires coordination of the components involved. This can be achieved by a common time-reference that is provided by clocking devices. In practice it can be a challenging task to provide such a system-wide reference, given the heterogeneity of CMOS integrated circuitry, the dimensions in space or number of such systems and the frequencies of operation. The time-delays in electronic signal transmission become important when the wavelength of a signal is of the order of the spatial dimension of the system. That means, that signal transmission delays become relevant once they are of the order of the time-scales of operation of the system. For example, for electronic components that are clocked at frequencies in the GHz regime, distances of a few milli- to centimeters become important even for signal transmission at the speed of light.
Our research focuses on self-organized synchronization of electronic clocks. While the state-of-the art approach to synchronization in electronic systems uses precise reference clocks, e.g., quartz oscillators or atomic clocks to entrain many low quality electronic clocks, so called phase-locked loops, we couple the cheap low quality clocks with each other in a setup that allow for synchronized states to form self-organized over such networks. This has the advantage, that communication delays do not need to be compensated for, e.g., by constructing complicated clocks trees or measuring signal transmission times. Furthermore, dynamically changing network topologies with large numbers of elements become feasible. This would allow to synchronize systems globally instead of following the globally asynchronous locally synchronous (GALS) solutions of most of todays electronic hardware.
The MODEL — identical phase-locked loops
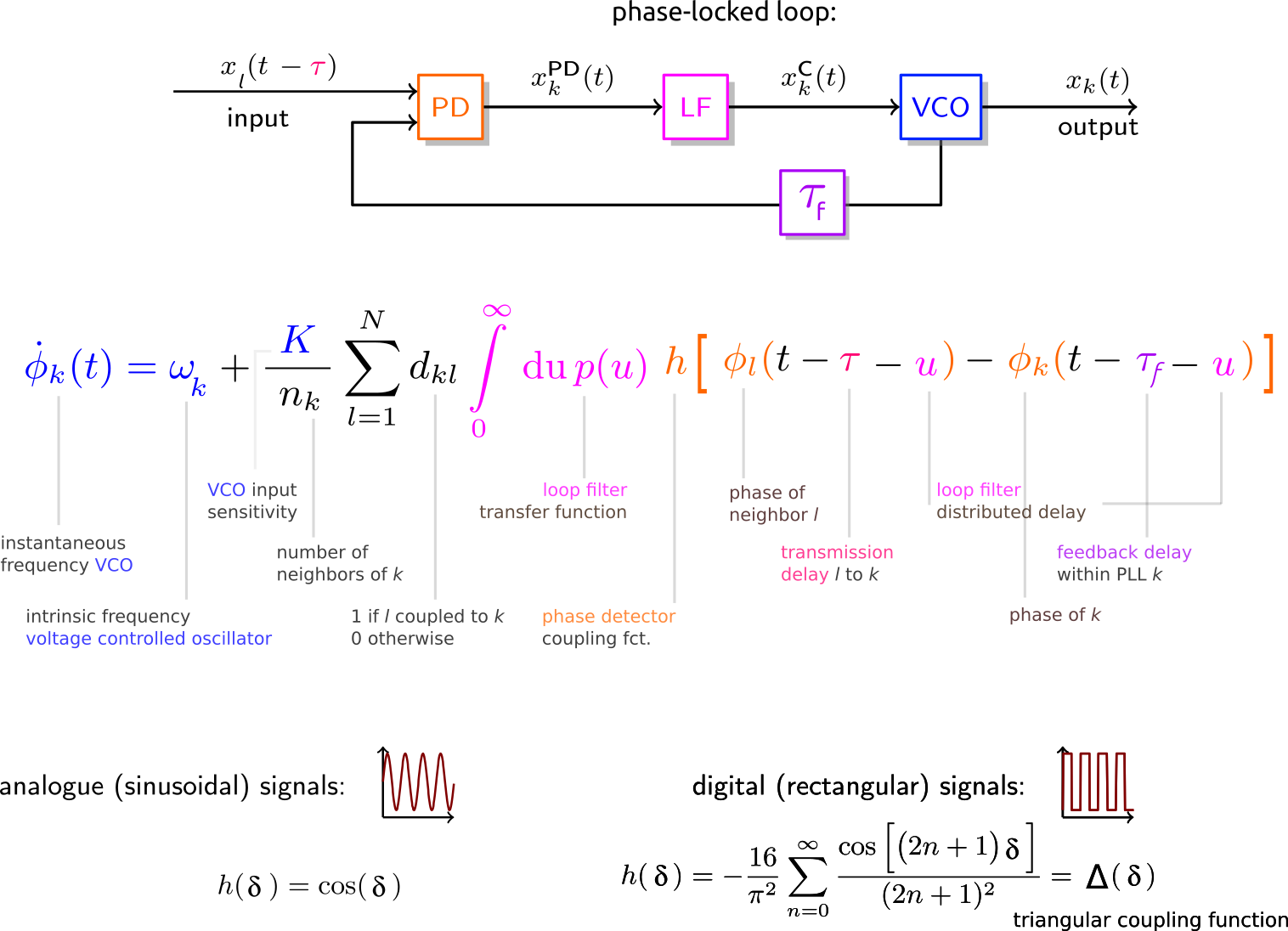
In this project we derived a mathematical model that is independent of the details of the circuitry of phase-locked loop (PLL) clocks. These consist of three main components, the phase-detector (PD), the loop filter (LF) and the voltage-controlled oscillator (VCO) and a signal path that feeds the output signal back to input. We start with generic periodic VCO output signals for which we assume constant amplitudes. These are exchanged between the PLLs. In each PLL, the PD detects the low and hight frequency components of the combined feedback and external input signals. Subsequently we assume, that the LF filters the high-frequency components ideally, which yields the control signal that affects the instantaneous frequency of the VCO. Under these assumptions we obtain a phase-model description of the dynamics of the instantaneous frequencies in PLL networks.
Schematic of a PLL and phase-model for a network of mutually delay-coupled PLLs.
For a Dirac-delta impulse response of the LF and no feedback and transmission delay, this reduces to the well known Kuramoto model of coupled phase-oscillators.
Synchronized solutions
From this model we can calculate the frequencies and phase relations between all oscillators in a network. In the case of identical clock elements the frequencies of synchronized states depend on the intrinsic frequencies of the individual clocks, the coupling strength, the feedback and transmission delays and the coupling function. There are also states with constant non-zero phase differences between the clocks, which are called -twist or splay states.
Linear stability
Whether these synchronized states are stable, marginally stable or unstable can be determined by performing a linear stability analysis. This requires the information about the network topology, i.e., which PLLs are coupled, the internal parameters of the clock elements and the transmission delays.
Experimental setup and results
We validated our theoretical predictions that were obtained using the phase model by carrying out experiments in prototype PLL networks. These consisted of low cost self-soldered PLLs prototypes running at kHz.
Using a microcontroller to artificially delay the coupling between PLLs at 1kHz
In order to measure the effects of transmission delay with clock elements running at just kHz, delay-times should be of the order of milliseconds and at least s. Instead of using hundreds of kilometers of copper wiring, we use a micro-controller that buffers the states and histories of the PLLs and then sends these signals at specified delays to the respective coupled nodes in the clock network.
Sketch of experimental setup of mutually delay-coupled DPLLs.
The experimental results confirm qualitatively and quantitatively the theoretical model predictions and can be found in the links to the published work at the beginning of this blog entry. In those publications we present results for networks of mutually delay-coupled DPLL networks that range from two to nine clock elements in different coupling topologies, such as ring, chain and square lattice with nearest neighbor interactions with open and closed boundary conditions.
Matlab Simulink, LTSpice and VHDL based simulations
In addition we performed numerical simulations of the dynamics of such PLL networks in python, Matlab/Simulink and LTSpice and VHDL. The Matlab/Simulink simulations test the assumption of the ideal filtering of the high frequency components from the phase detection. The python code allows to simulate large networks of delay-coupled PLL networks in many different settings, heterogeneous parameters and with noise. The LTSpice simulations on the level of the circuitry, i.e., voltages and currents in such systems, help us to plan the next versions of experimental setups and applications.
The next generation experimental setup with tunable devices and running at 1-10 MHz
Currently we are working on the next generation of prototype PLL elements running in the MHz frequency regime. This setup will allow to tune many parameters of the individual clock components, such as the delay-times, the cut-off frequencies of the LFs, the coupling strengths and the feedback path inverter elements. It will provide the necessary means to quantify the effects of noise in such systems.
THE P in PVT variations — Networks of Heterogeneous Phase-locked loops
The production process of CMOS integrated electronic circuitry yields highly heterogeneous elements. This leads to static, process induced heterogeneity. It can not be assumed that these heterogeneities can be characterized through measurements for mass market units. Hence, electronic architectures based such elements need to perform their tasks robustly in the presence of large differences in the parameters of the different nodes and network. Since self-organized dynamics in large complex systems depends on many parameters we study the effects of such static heterogeneities for CMOS based clocking networks.
This work, that has mainly been carried out together with Nirmal Punetha, produced some exiting results that we will soon publish in a peer-reviewed scientific journal. A more detailed blog entry that highlights the most important and exiting results will follow soon.
Beyond linear Stability — The basins of Attraction of synchronized states
Another important part of our efforts is the characterization of the basins of attractions of self-organized synchronized states. This goes beyond linear stability analysis which can only provide information about a systems reaction to small perturbations from its possible states.
We approach this question using the -adaption algorithm develop by the group of Prof. Dr. Ivo Sbalzarini. Instead of performing brute-force sampling of highly dimensional spaces of phase configurations for large systems of coupled elements, we make use of volume approximation to learn about the sizes of the basins of attraction for different synchronized states. This enables us to plan networks for technical applications, for which it is necessary to provide the conditions for which robust functionality can be guaranteed.
This will also be presented in more detail in a separate blog post.
Noisy Phase-locked Loops
Langevin-equations for delay-coupled phase-locked loops
 fF.
fF.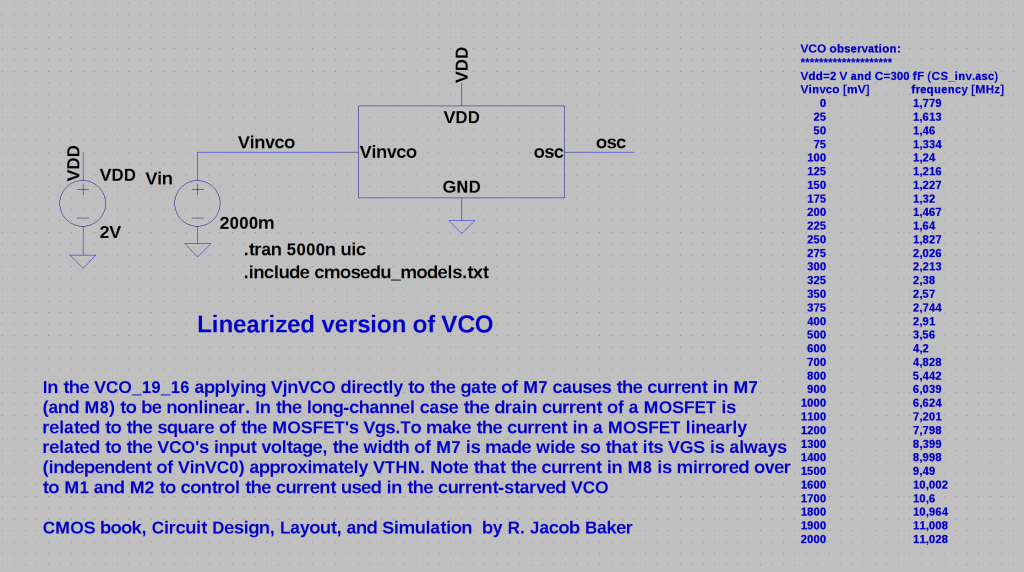
 .
.
 -twist or splay states.
-twist or splay states. kHz.
kHz.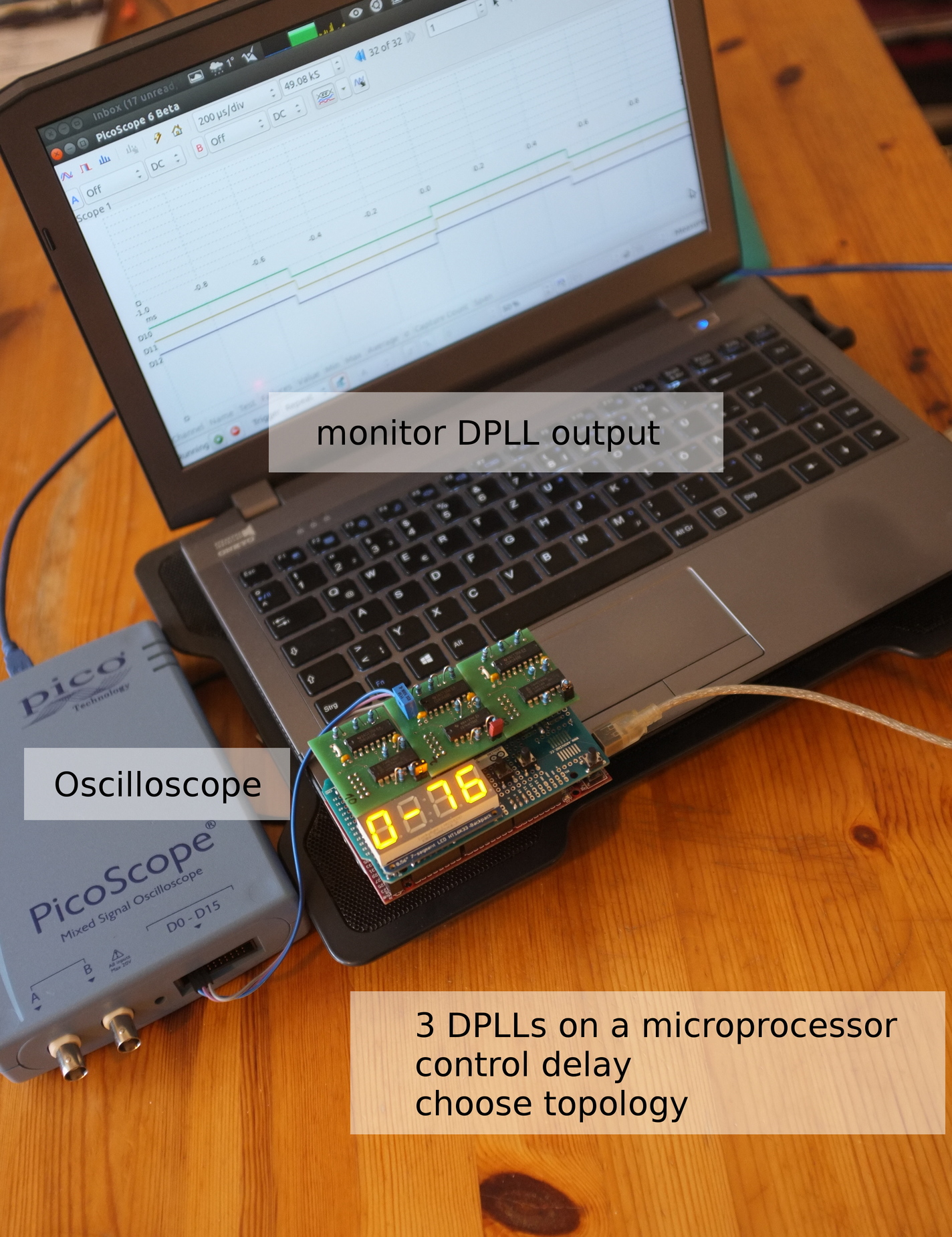
 s. Instead of using hundreds of kilometers of copper wiring, we use a micro-controller that buffers the states and histories of the PLLs and then sends these signals at specified delays to the respective coupled nodes in the clock network.
s. Instead of using hundreds of kilometers of copper wiring, we use a micro-controller that buffers the states and histories of the PLLs and then sends these signals at specified delays to the respective coupled nodes in the clock network.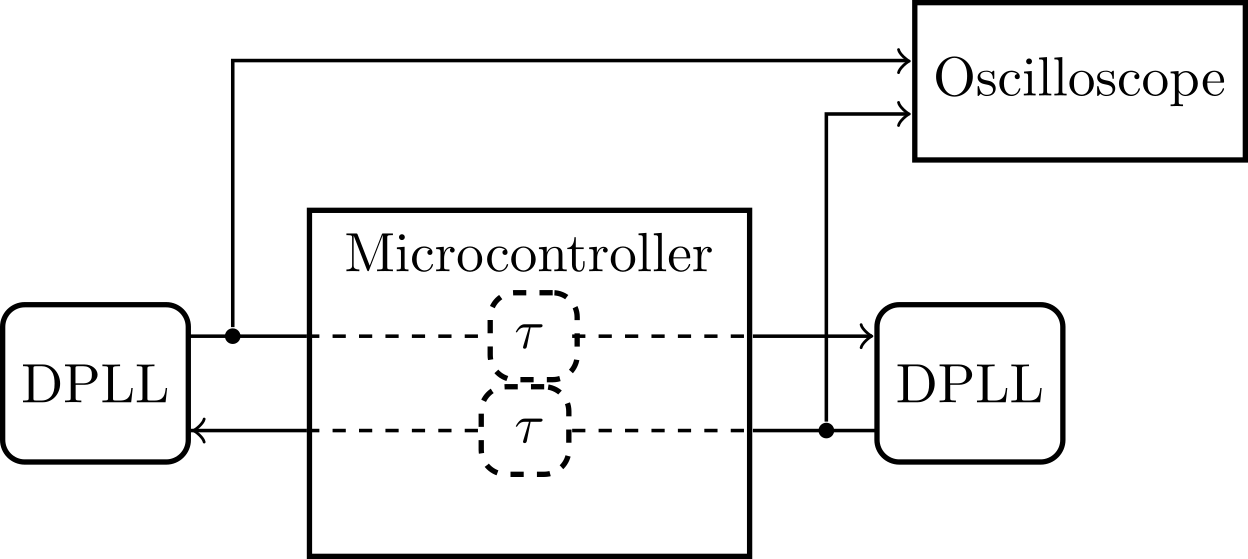
 square lattice with nearest neighbor interactions with open and closed boundary conditions.
square lattice with nearest neighbor interactions with open and closed boundary conditions. -adaption
-adaption